 DIY
DIY 【ラズベリーパイでリアルタイム映像配信】プログラミングロボット完成までのみち_part5
このページは、次の内容を記載しています。 ラズベリーパイへのカメラモジュールの取り付け方法 リアルタイム映像配信の設定方法(mjpg-streamer使用) m...
DIY  DIY
DIY 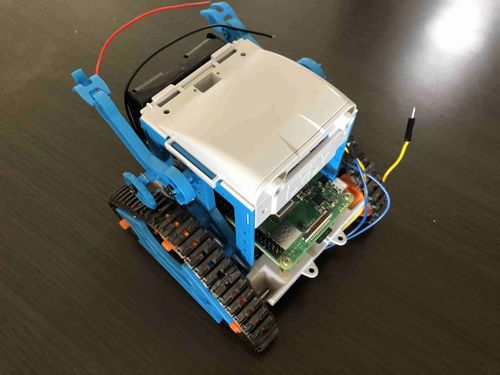 DIY
DIY  DIY
DIY