必要なもの

プログラミングロボットを動かすために必要なものは、ミニ四駆でおなじみの”タミヤ”「カムプログラミングロボット」と小型PC「ラズベリーパイ」。あとは配線や電池ボックスなどのパーツです。
スマホをコントローラーにしてロボットを動かすことができます。

他には穴あけ工具ピンバイスを使います。これは、プログラミングロボットにラズベリーパイの基盤を取付けるときに、穴をあけるときに使います。

コネクタピン(写真の上)を、プログラミングロボットに付属しているモーターの配線につなげる手順があるので、圧着ペンチ(写真の下)もあると便利です。ペンチでも代用はできると思います。
参考にした本
このページで紹介してる内容を詳しく知りたい方は、こちらの本を参考にしてください。
若干内容が古いため、ラズベリーパイのOSをインストールする方法が異なります。
ラズベリーパイ3(写真左)にラズベリーパイ用のOSをインストールするためのmicroSD(写真右)
ラズベリーパイは、読み込めるmicroSDの容量が32GBまでなので、それよりも大容量のmicroSDは必要ありません。

ラズベリーパイにOSをインストール
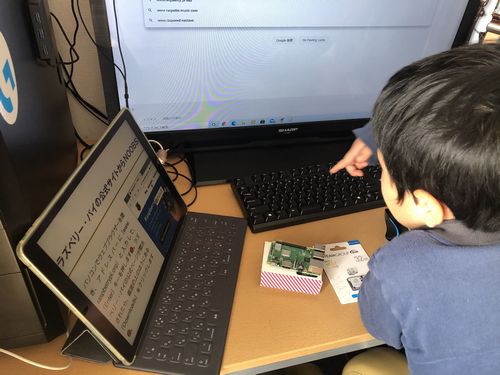
本には、かなり詳しくインストールの方法が書いてあります。子供でも挿絵を見ながら教えればインストールは可能ですよ!(5歳の子でも楽しみながらできました!)
パソコンから、microSDにラズベリーパイをインストールします。ラズベリーパイは小さいパソコンのようなものなので、OSが必要です。
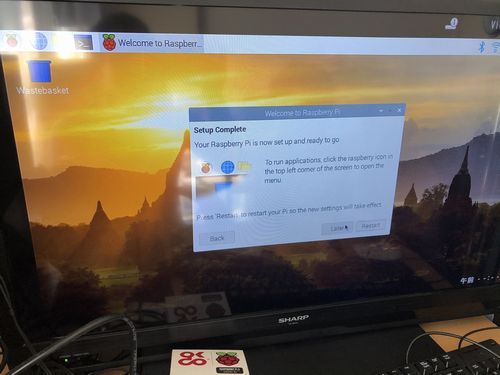
ラズベリーパイには、OSをインストールしたmicroSDと、画面用のHDMIの端子や、キーボードなどのUSB端子をつなげて操作します。

ラズベリーパイを起動させると下の写真のような画面になります。
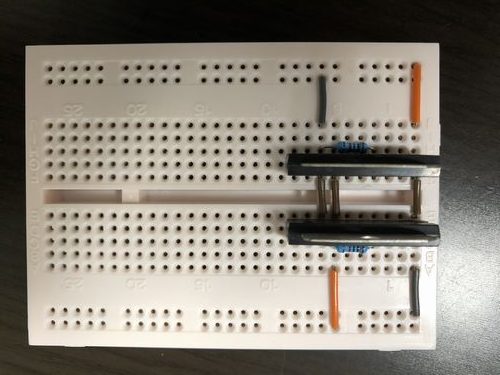
ブレッドボードに配線
この本で紹介されているプログラミングロボットには、ブレッドボードを使います。
ブレッドボードにはモーターを制御する部品(真ん中右の黒い部品)が付いています。
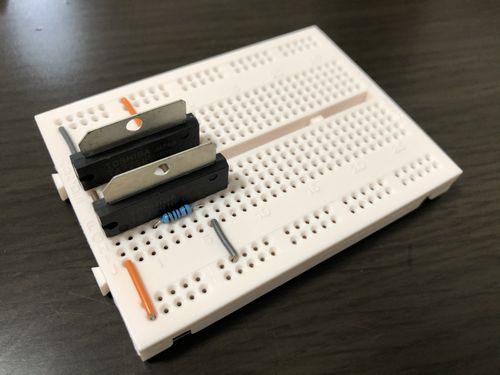
斜めから見るとこんな感じです。複雑な配線はないので、子供でも簡単にできましたよ!(穴の位置に合う長さの線は見つけてあげた方がスムーズにいくと思います。)
次回:ロボットを組み立てる
ラズベリーパイとブレッドボードの準備が整ったら、ロボットを組み立てます。モーターで稼働するので、部品同士がスムーズに動くようにグリースアップしながら作っていきましょう!
綿棒にグリースを付けて、楽しそうにグリースアップしています↓

今回は、ここでタイムアップ!次回は、動かすところまでいけるかなー、おたのしみに!