タミヤ「カムプログラムロボット」完成
前回は、カムプログラムロボットに搭載するラズベリーパイの設定が中心でしたが、今回はカムプログラムロボット本体の作成がメインです。
前回からの進捗はこんな感じです。

完成形が見えてきて、がぜん息子のやる気が出てきたみたいです。
ただし、子供の力だと組み立てが難しいため、綿棒でグリスを塗ったり、できそうな部品の組み立てを一緒にやりました。
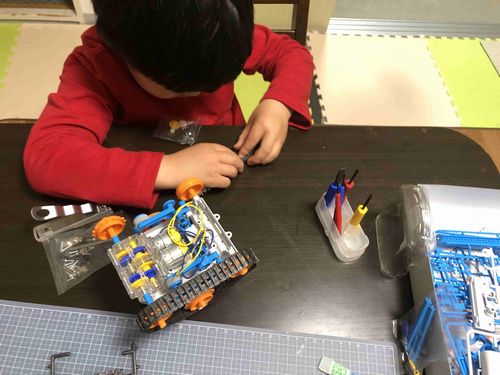
シャフトにホイールを取付けている場面です。結構な力がいるため、子供にはチョット難しいです。
しかし、雰囲気は味わえたみたいで満足そうでしたよ!
ロボットにラズベリーパイを搭載!
タミヤ「カムプログラミングロボット」のフレームにラズベリーパイの基盤を取付けていきます。
基盤を取付けるために、フレームにピンバイス(直径3mm)で2つ穴をあけます。
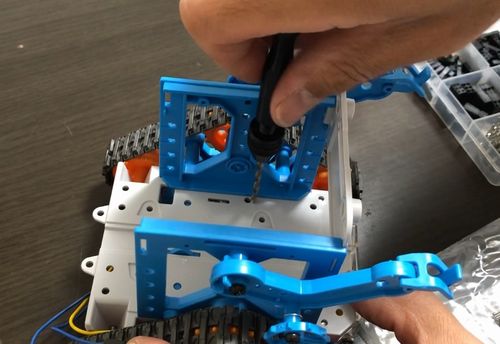
新たにあける穴はラズベリーパイの基盤の穴と位置を合わせます。元からあいている穴のギリギリの位置になるので、つながってしまわないように注意してください。
穴をあけたら、元からあいていた穴2つと、新たにあけた穴2つにスペーサーねじ(15mm)を取付けます。
スペーサーねじの取り付けは、ロボットのモーターが入っている部品を外したりして、作業しやすいようにしてください。
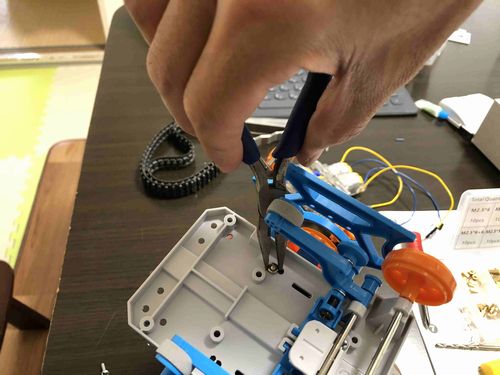
スペーサーねじの裏側は、ナットで固定します。とても小さいので、ペンチなどでナットをつかみながら作業をするとやりやすいですよ!
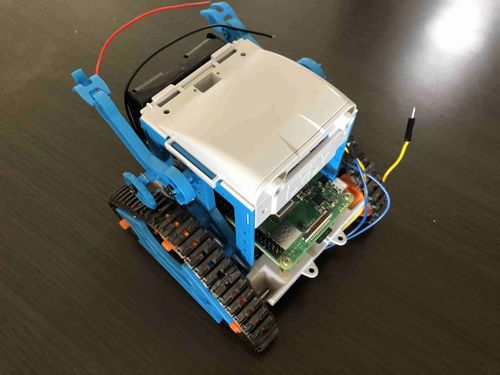
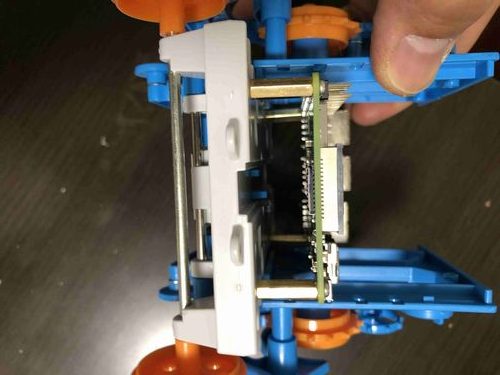
スペーサーを取付けたら、ラズベリーパイをロボットのフレームにねじ止めして固定します。

15mmのスペーサーでかさ上げしているので、真横から見るとこんな感じになります。
電池BOXの取り付け
プログラミングロボットとして稼働させるためには、付属の電池BOX(1本用)ではなく、別途4本用の電池BOXを取付けます。

4本用の電池BOXは、通販で簡単に購入できます。カムプログラミングロボットの前側に電池BOXが取付けられるように、電池BOXにピンバイスでねじ用の穴をあけます。
穴の位置をロボットのフレームと合わせて穴をあけます。電池BOXのどこに穴があくかよく確認しながら作業を進めます。

電池BOXを取付けるためのねじは「カムプログラミングロボット」のパーツに入っている一番小さいねじを使用します。ねじは何種類か付属されているので、確認が必要です。下の写真の一番右側のねじ2つです。

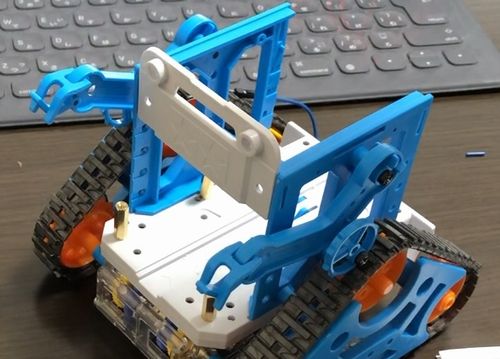
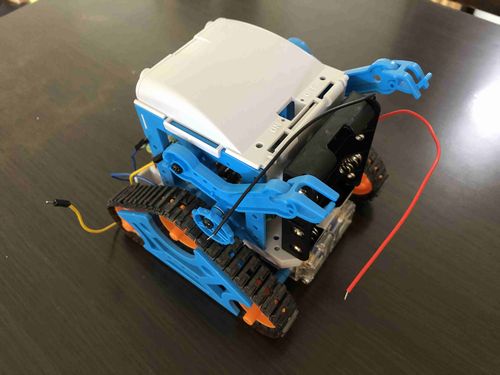
電池BOXの取付完了
電池BOXを取付けるとこんな感じになります。完成が見えてきました。
参考にした本
このページの内容は、次の本を参考にしています。ラズベリーパイと電池BOXの取り付けは、本の中ではあまり詳しく書かれていませんので、このページを参考にしていただけたらと思います。
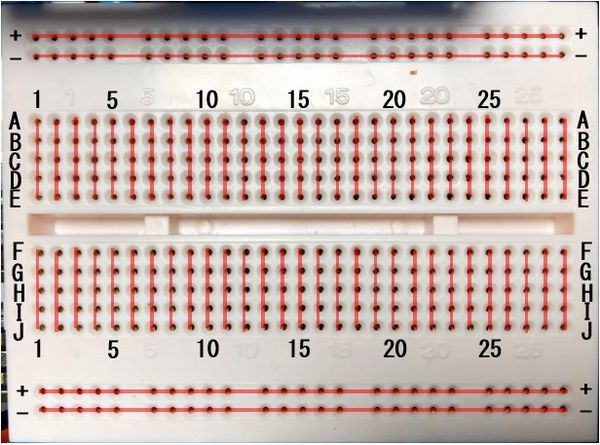
次回は、ブレッドボードの取り付けと、モーター制御ソフトの作成を予定しています。