このページは、次の内容を記載しています。
- ラズベリーパイへのカメラモジュールの取り付け方法
- リアルタイム映像配信の設定方法(mjpg-streamer使用)
- mjpg-sstreamerのインストール方法を動画で紹介
1.カメラモジュールの取り付け

スマホで操作可能なプログラミングロボットに、カメラを搭載させて、リアルタイム映像を見ながら操縦ができるように改良してみようと思い、この記事を書くに至りました。
カメラモジュールはAmazonで\1,500くらいで購入できます。
ラズベリーパイのカメラモジュール端子

上の写真で、赤く囲まれている端子のすぐ下に「CAMERA」と書かれています。(わかりにくくてすみません。)
カメラモジュール用端子に接続
端子のツマミを上にあげて、ロックを外します。

カメラモジュールの配線をつなぎ、ツマミを下げてロックします。

2.リアルタイム映像配信の設定方法(mjpg-streamer使用)
カメラの有効化
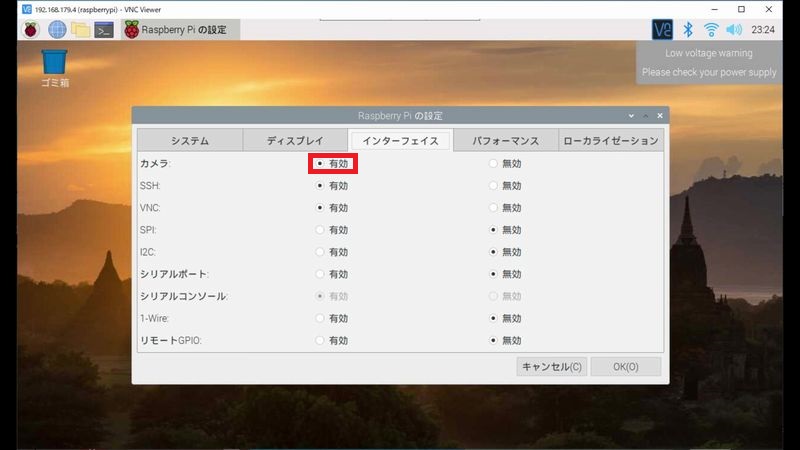
左上のRaspberry Piのメニューボタンから「設定」>「Raspberry Piの設定」をクリックし、システム設定を開きます。 「インターフェイス」タブをクリックし、「カメラ」が「有効」にチェックを入れます。
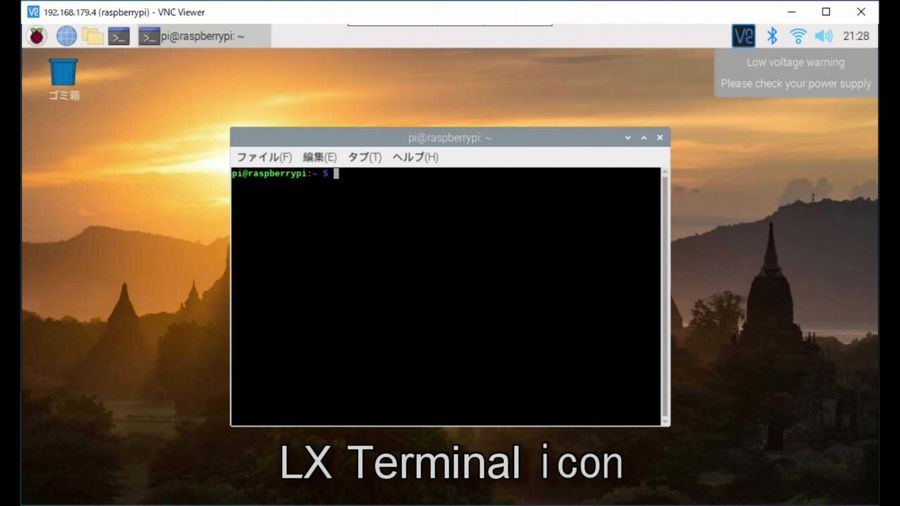
LX Terminalで「mjpg-streamer」をインストール
左上のLX Terminalアイコンをクリックします。
次の順番で、コマンドを実行していきます。
(※$ 以下のコマンドをコピーして、順番にエンターキーを押して実行してください。)
- $ sudo apt update
- $ sudo apt install git cmake libjpeg8-dev
- $ git clone https://github.com/jacksonliam/mjpg-streamer.git
- $ cd mjpg-streamer/mjpg-streamer-experimental
- $ make
- $ sudo make install
- $ bash start.sh
mjpg-streamerの起動
ラズベリーパイと同じWiFiネットワーク上のPC(タブレット)で、ブラウザを開きます。
アドレスバーに、「ラズベリーパイのipアドレス:8080」と入力します。すると、mjpg-streamerの画面が表示されるので、左サイドバーの「Stream」をクリックすると、カメラの映像をリアルタイムでみることができます。
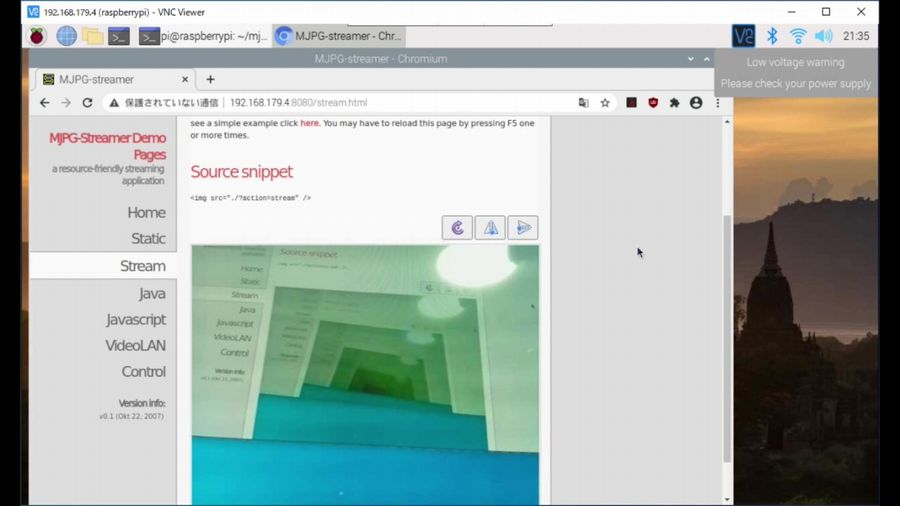
カメラのリアルタイム映像をカメラで撮影しているので、合わせ鏡のような状態になってしまいました 笑
3.mjpg-sstreamerのインストール方法を動画で紹介
実際にラズベリーパイでコマンドを入力している映像です。参考になれば幸いです!
以上、カメラモジュールの取り付け方法と、リアルタイム映像の確認方法をご紹介しました。

